NASA
Mars Drone

NASA's Advanced Operations Concept Lab and Buendea developed the NASA XR Operations Support System (XOSS) utilizing Unreal Engine 5 from Epic Games. The multi-user extended reality (XR) simulation platform enables NASA researchers to prepare astronauts to live and work on Mars in a hyperrealistic environment.
The NASA MarsXR Challenge was a two-year competition designed to assist NASA in creating virtual scenarios and assets for the XOSS platform. Our team took on this challenge by developing an innovative robotic aerial drone XR asset that pushes the boundaries of what's possible.
Creative leadership
System analysis
2D design
3D modeling
Challenge
Astronauts venturing to Mars will encounter significant challenges when it comes to scientific sample collection from remote locations. How can we help them transport payloads and collect data?
Outcome
After researching robotic aerial vehicles for Mars, our team concluded that the low density of the Martian atmosphere makes it difficult to achieve enough lift for a fixed-wing aircraft to take off from the ground. The Mars atmosphere is 99% less dense than Earth's. As a result, we selected a rotorcraft configuration instead of a glider to assist scientists in carrying payloads and collecting data from Mars. The NASA Ingenuity mission on Mars proved a Vertical Take-Off and Landing (VTOL) drone can take off from the ground, hover to survey an area, and land on rugged terrains.

Our team explored and designed a robotic aerial drone inspired by the conceptual designs of the NASA Mars Science Helicopter, a second-generation rotorcraft for Mars exploration. We designed our XR asset using advanced system analysis, 2D tools (Adobe Illustrator) and 3D modeling tools (Blender and Unreal Engine 5).
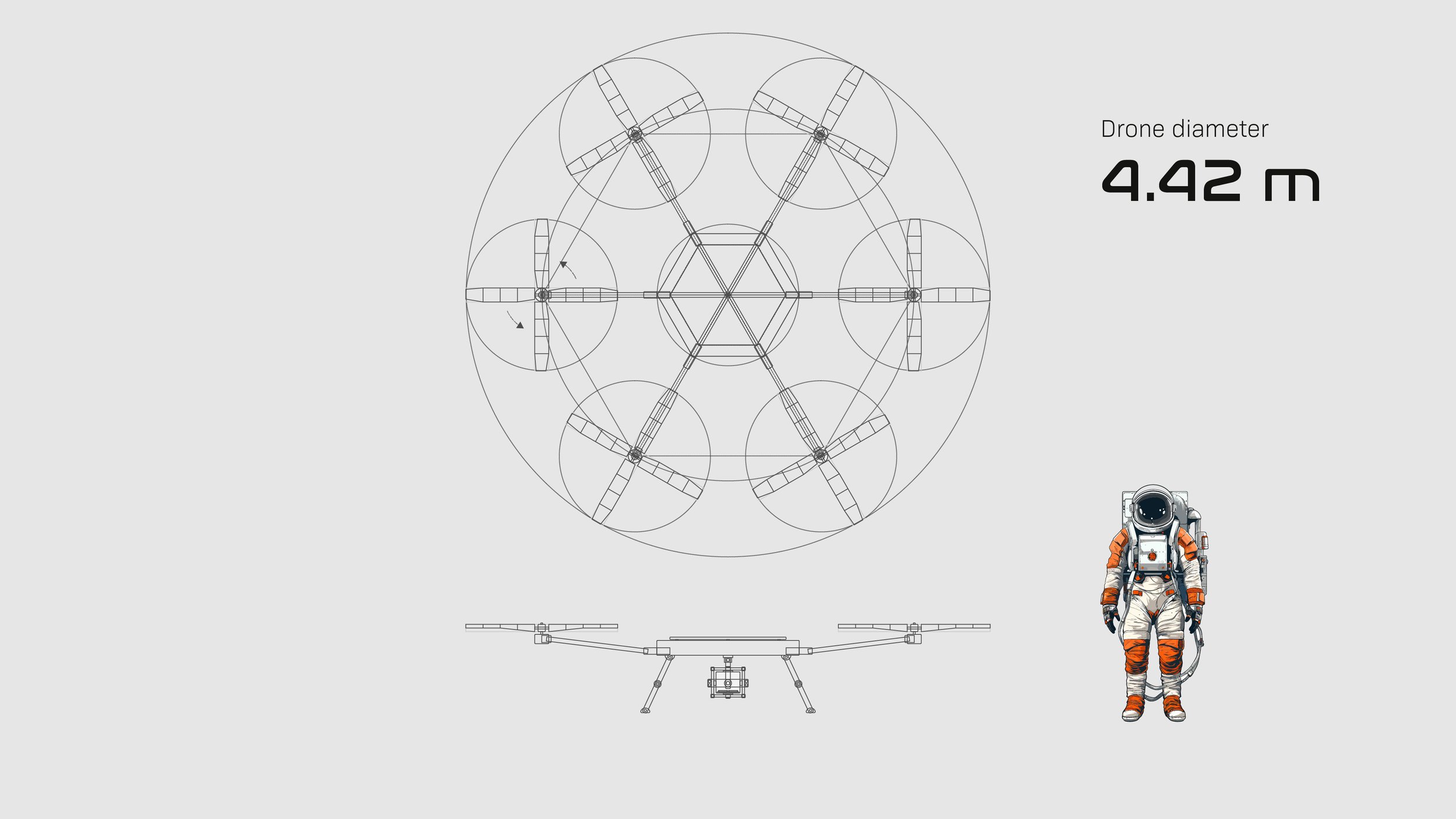

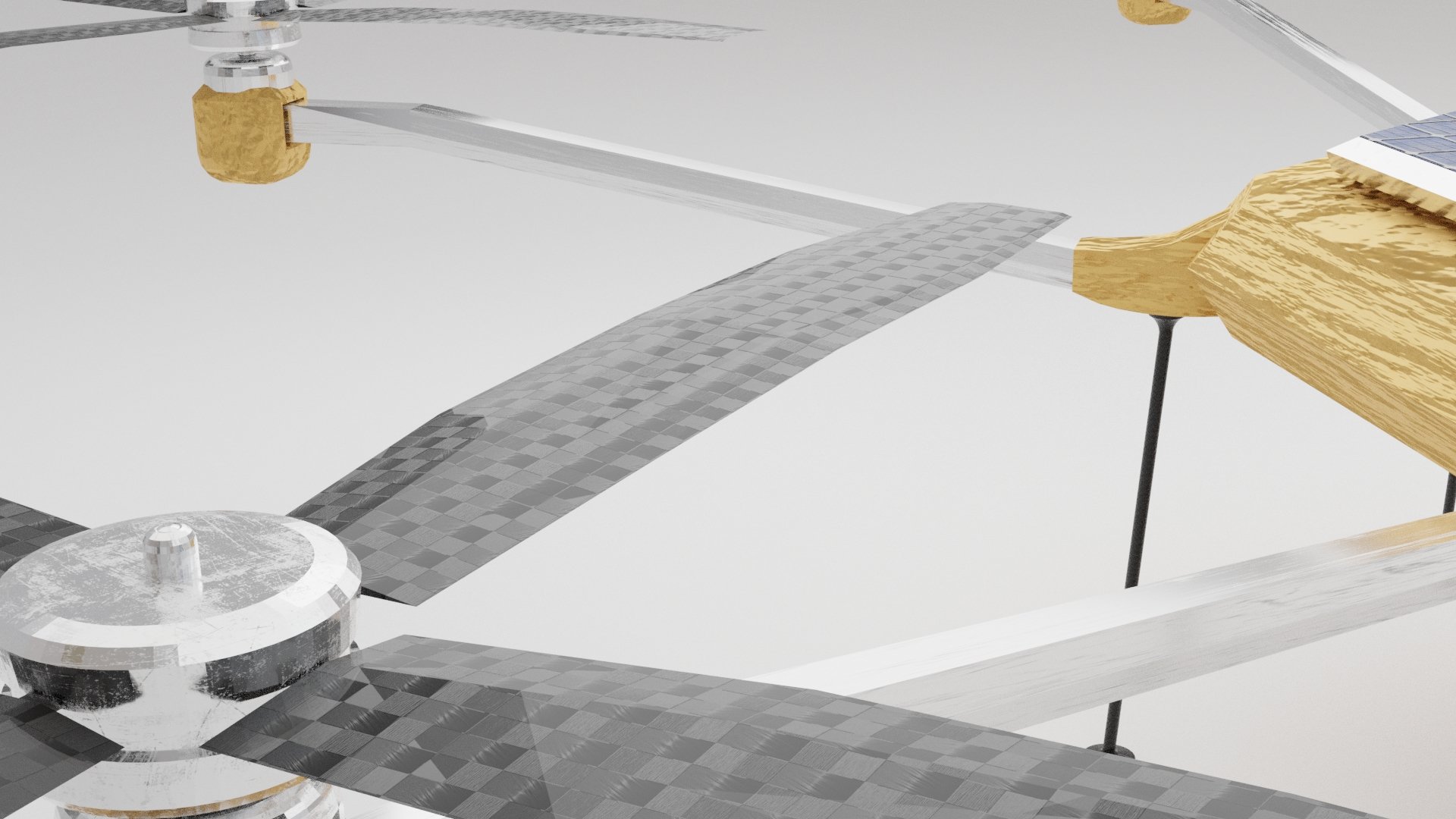


We designed the hexacopter to be highly versatile and support various mission requirements. The 3-axis digital stabilizer gimbal could carry a wide range of small payloads and science instruments to acquire information about Mars's geology, atmosphere, environmental conditions, and potential biosignatures.




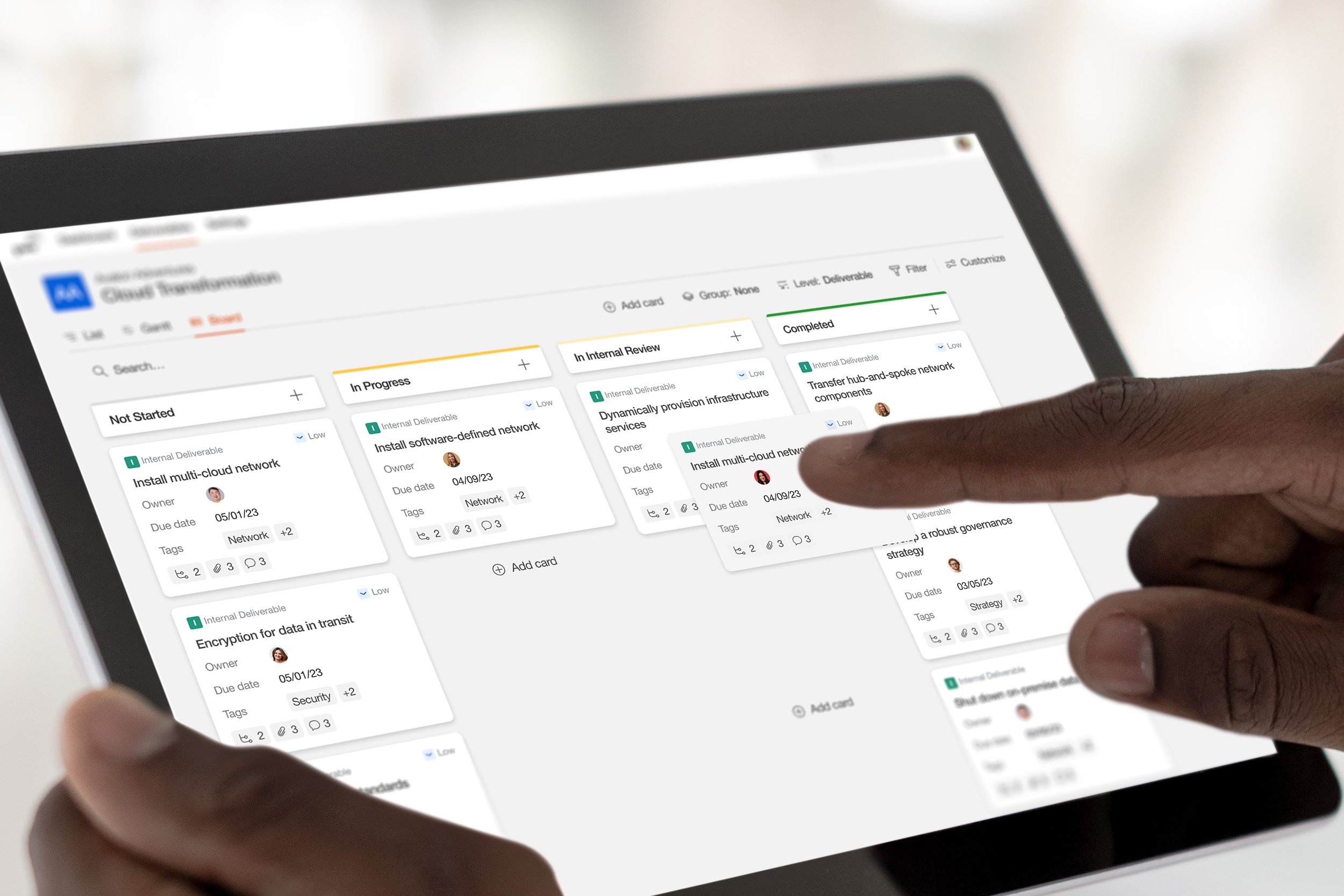
Drone User Interface
In addition to the drone, we designed a user interface to command and control the vehicle. We assumed the drone will be autonomous, but the astronauts must still transmit the mission profile in addition to monitor and track the drone's operations and flight path from the ground.